警告
これは、古いバージョンのドキュメントです。 最新の情報をご覧になりたい場合は、次をご覧ください。 2025.11 .シーケンスとスマートアクション
ここでは、シーケンスやスマートアクションのためにアジキューブに送ることができるすべての利用可能なコマンドを紹介します。これらのコマンドは ターミナル 、またはロボット/PLC からアジキューブのイーサーネットポート ( TCP/IP ) を介して送信することが可能です。
上記のコマンドは、以下に説明するスマートアクションに特有のパラメータを導入しています。
スマートセンタリングのための重心パラメータ
スマートセンタリング動作 EC や、スマートセンタリング動作を含むシーケンス ES を用いる場合、プラットフォーム上のパーツの質量中心を記入する必要があります。 図 117 に示すように、カメラの解像度やカメラメーカーの画像の向きや原点の選択に依存しないように、プラットフォーム上の位置は両方向で -1 から +1 の間で正規化されています。以下の例では、パーツの質量中心は座標値( -0.5;0.7 )に位置しています。
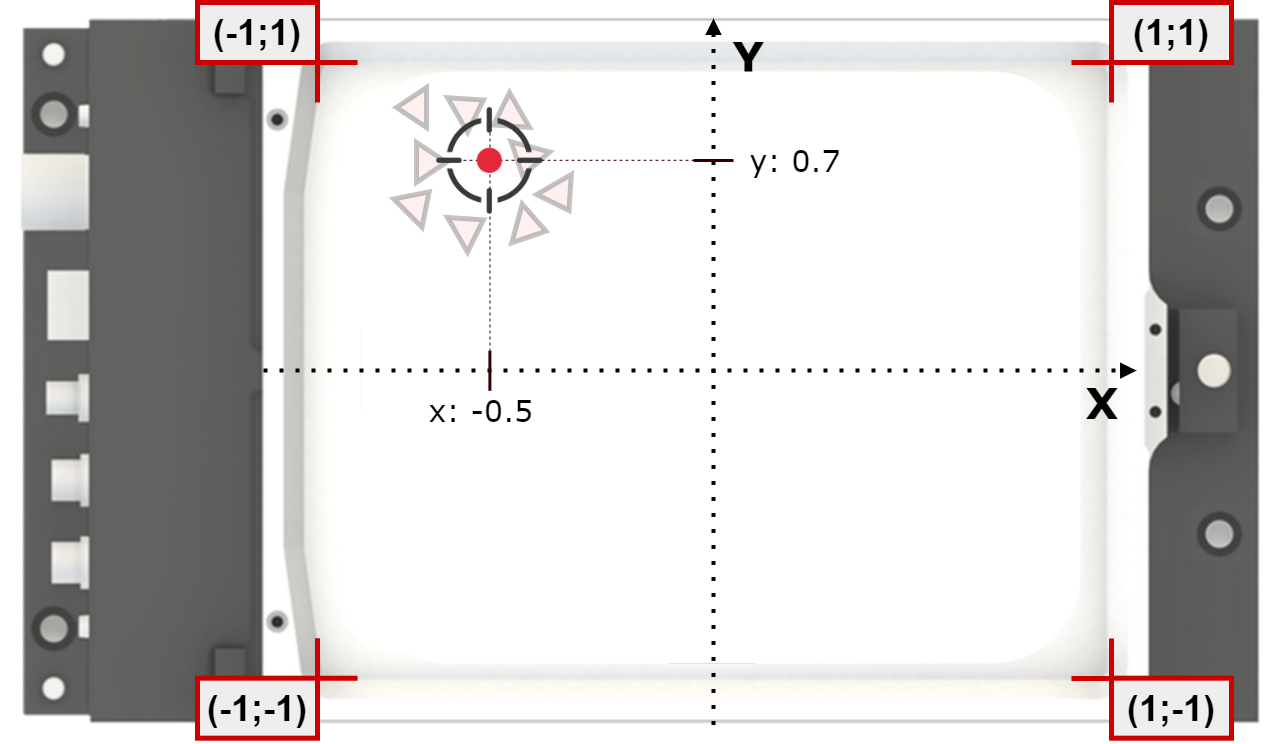
図 117 パーツの質量中心 - 正規化されたプラットフォームは、-1 から +1 の間
スマートなセンタリングのためのプラットフォームの分割
スマートセンタリング動作 EC は、パラメータとして与えられた重心座標を使用して、最適な振動の種類を選択し、振動の持続時間を最適化します。 振動の種類 は、 図 118 に示されたプラットフォーム分割に基づいて選択されます。
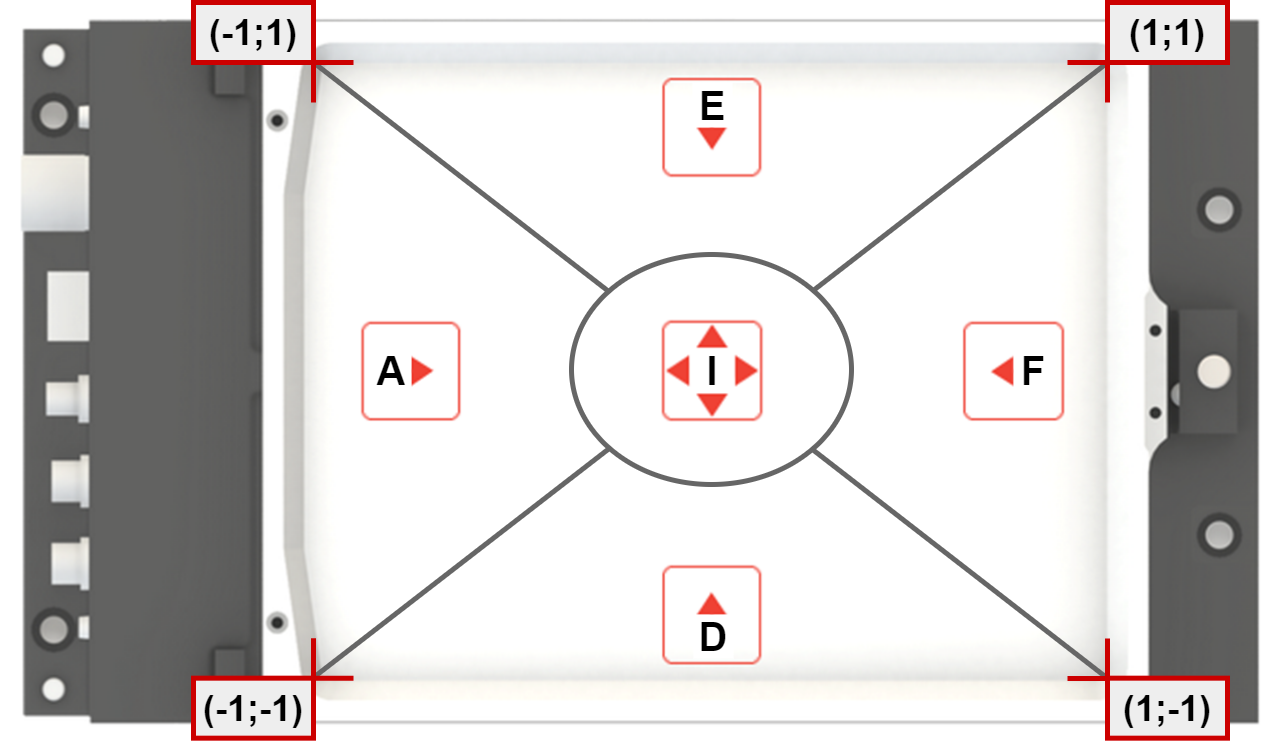
図 118 スマートなセンタリングのためのプラットフォームの分割
スマートセンタリングのための振動の持続時間
スマートセンタリングの持続時間の計算を 図 119 の例を用いて説明します。重心( 0.2;0.5 )はプラットフォームの E の部分に位置しています。スマートセンタリングの実行 EC は、 振動タイプ の E(右)を使って、パーツの重心をプラットフォームの真ん中に持って来ようとします。持続時間は、最も遠い座標 \(d_1\) とプラットフォーム全体を横切るのに必要な時間 \(t(d_2)\) に基づいて計算されます( 持続時間の設定方法 を参照)。 図 119 の例では、最も遠い座標は \(Y=0.5\) となります。
そして、以下の式で持続時間 \(t(d_1)\) を計算します。
\(t(d_2)\) を 1500ミリ秒と \(d_2=2\) に設定したと仮定した場合です。
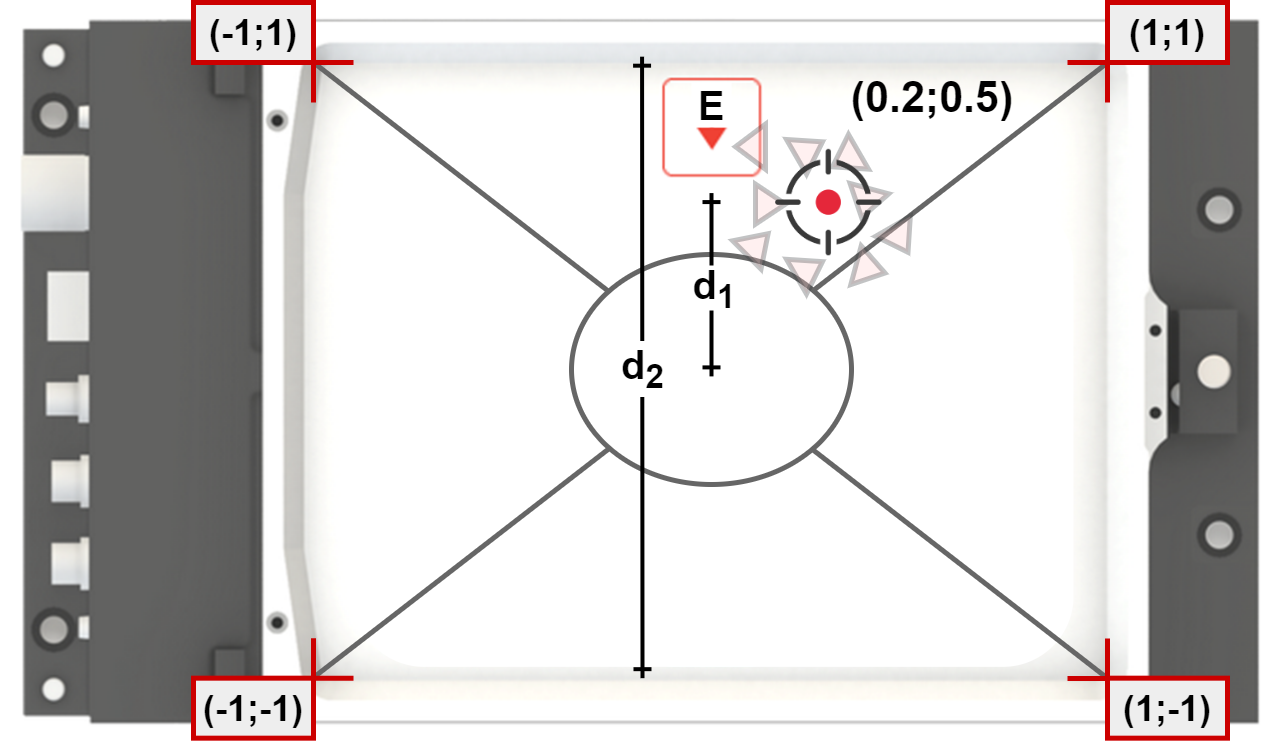
図 119 スパーとセンタリング動作の持続時間
スマート供給のためのパーツ数
スマートフィーディング動作 EF またはスマートフィーディング動作を含むシーケンス ES を使用する場合、プラットフォーム上のパーツ数と最適なパーツ数を入力する必要があります。これらのパラメータは、アジキューブがホッパーの振動時間を自動調整するために使用されます。プラットフォーム上のパーツ数が多ければ多いほど、振動時間は短くなります。プラットフォーム上のパーツ数が最適な数に達すると、振動はゼロになります。その間の振動時間は直線的に補間されます。詳細は、 スマート供給 を、具体的な例は、 スマートフィーディング使用例 を参照してください。