警告
これは、古いバージョンのドキュメントです。 最新の情報をご覧になりたい場合は、次をご覧ください。 2025.11 .統合(インテグレーション)例
標準インテグレーション
ここには、典型的な アジキューブ統合の例があります( 図 179 )。この標準統合には、各アジキューブに1つの FB_Execute_Sequence ブロックが必要です。
供給するパーツに応じて、自動運転を開始する前に使用する振動レシピを設定するだけです。
自動運転を開始すると、最初に画像解析が行われ、ピック可能なパーツがある限り、その座標がロボットに送信され、最後のパーツがピック出されるまで続きます。
パーツがもう残っていない場合、フィーダー上のパーツ数とその質量中心の位置を把握した上で、振動シーケンスの実行をトリガーします( inXPosPIN と inYPosPIN の値は、質量中心の座標系 で説明されている値の100倍に相当します)。
ヒント
バックライトのトリガーには専用のデジタル入力を使用することをお勧めします。もしそのような方法がない場合は、 boBacklightPIN 入力を使用して制御することができます。
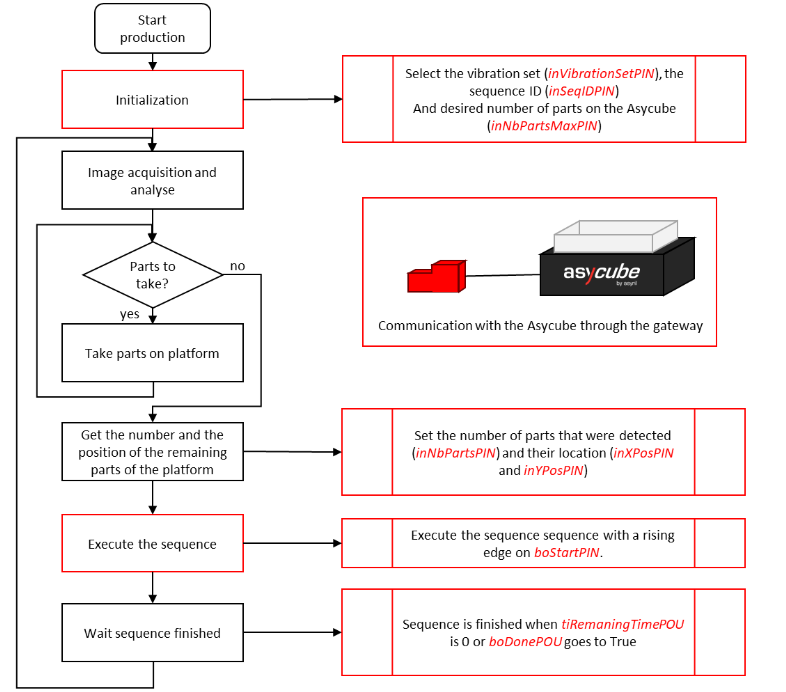
図 179 標準実装例
その他の統合(インテグレーション)
標準統合がアプリケーションに適合しない場合、他の FB を使用することができます。ただし、上記の標準例のように作業することを強くお勧めします。すべての FB については 機能ブロックの説明 に記載されています。