Avertissement
Vous lisez une ancienne version de cette documentation. Si vous souhaitez obtenir des informations actualisées, veuillez consulter 2025.11 .EF - Exécution d’une alimentation (execute feeding)
Commande
EF:(vibration;N_parts;N_parts_limit)
Paramètres
vibration - Type de vibration (seule la vibration de type A doit être utilisée)
N_pièces - Nombre de pièces sur la plateforme
limite_N_pièces - Limite du nombre de pièces sur la plateforme
lorsque paramétré à 0, le nombre optimal de pièces défini dans Asycube Studio est utilisé, voir Réglez les paramètres de l’alimentation intelligente
Renvoie
EF:(vibration;N_pièces;limite_N_pièces;durée), où
<vibration>est le type de vibration<N_pièces>est le nombre de pièces sur la plateforme<limite_N_pièces>est la limite du nombre de pièces sur la plateforme<durée>est la durée de l’alimentation
Description
Cette action intelligente est utilisée pour alimenter la zone de prélèvement de l’Asycube en nouvelles pièces sur la base de données provenant d’un système de vision. Cette commande déclenche une vibration d’alimentation qui ajuste automatiquement la durée de la vibration en fonction du nombre de pièces détectées sur la plateforme <N_pièces> et du nombre optimal de pièces sur la plateforme <limite_N_pièces> indiqué dans la commande (voir Nombre de pièces pour l’alimentation intelligente).
Le nombre optimal de pièces et la durée maximale de la vibration sont configurés dans une recette. Utilisez l’assistant de recette d’Asycube Studio pour régler les paramètres de l’alimentation intelligente.
La durée de l’alimentation qui en résulte est indiquée dans la réponse. Pendant une alimentation en cours, utilisez la commande ?44 - Obtenir la durée restante de la vibration de la trémie pour obtenir le temps de vibration restant.
Exemple d’utilisation
Supposons que la durée maximale de vibration ait été fixée à 1000 ms et que le nombre optimal de pièces sur la plateforme pour l’application soit de 110 (voir Réglez les paramètres de l’alimentation intelligente). Lorsque le système de vision a signalé 0 pièce sur la zone de prélèvement, la commande suivante doit être envoyée :
Command : EF:(A;0;110)
Response : EF:(A;0;110;01000)
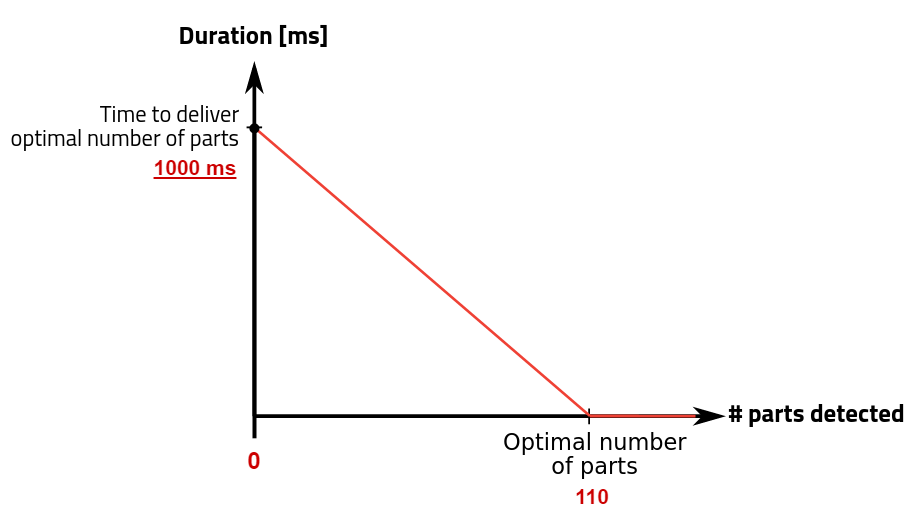
Aucune pièce n’ayant été détectée sur la zone de prélèvement, la durée de vibration obtenue correspond à la durée de vibration maximale de 1000 ms.
Supposons que le système de vision détecte 55 pièces dans la zone de prélèvement, la commande suivante doit alors être envoyée:
Command : EF:(A;55;110)
Response : EF:(A;55;110;00500)
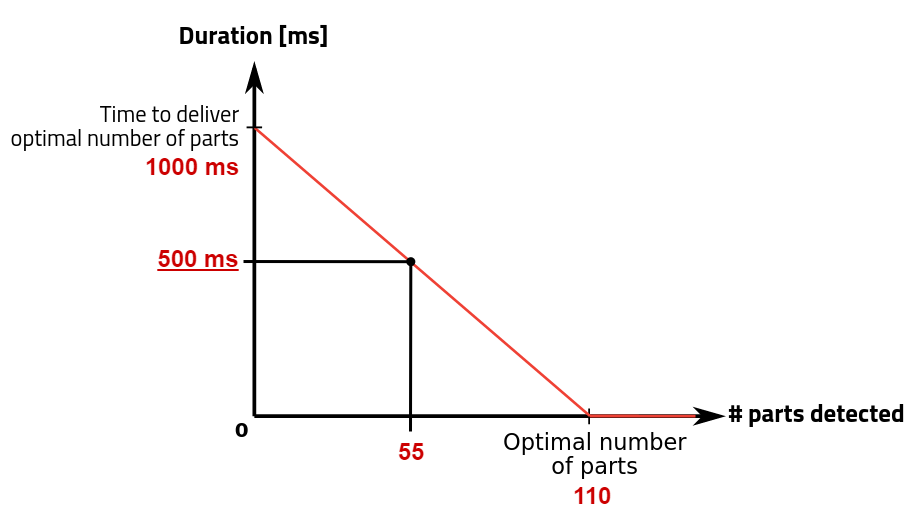
La durée de vibration résultante est égale à la moitié de la durée de vibration maximale, c’est-à-dire 500 ms, car la zone de prélèvement est déjà à moitié pleine.