Avertissement
Vous lisez une ancienne version de cette documentation. Si vous souhaitez obtenir des informations actualisées, veuillez consulter 2025.11 .Séquences et actions intelligentes
Ici sont présentées toutes les commandes disponibles qui peuvent être envoyées à l’Asycube pour les séquences et les actions intelligentes. Ces commandes peuvent être envoyées via le Terminal ou depuis votre robot/API via le port Ethernet de l’Asycube (TCP/IP).
Les commandes ci-dessus introduisent des paramètres spécifiques aux actions intelligentes qui sont décrits ci-dessous.
Paramètres du centre de masse pour le centrage intelligent
Lors de l’utilisation de l’action de centrage intelligent EC ou d’une séquence ES qui inclut une action de centrage intelligent, le centre de masse des pièces sur la plateforme doit être renseigné. Comme le montre la Fig. 117, les positions sur la plateforme sont normalisées entre -1 et +1 dans les deux directions afin d’être indépendantes de la résolution de la caméra ou du choix de l’orientation et de l’origine de l’image du fabricant de la caméra. Dans l’exemple ci-dessous, le centre de masse des pièces est situé aux coordonnées (-0.5;0.7).
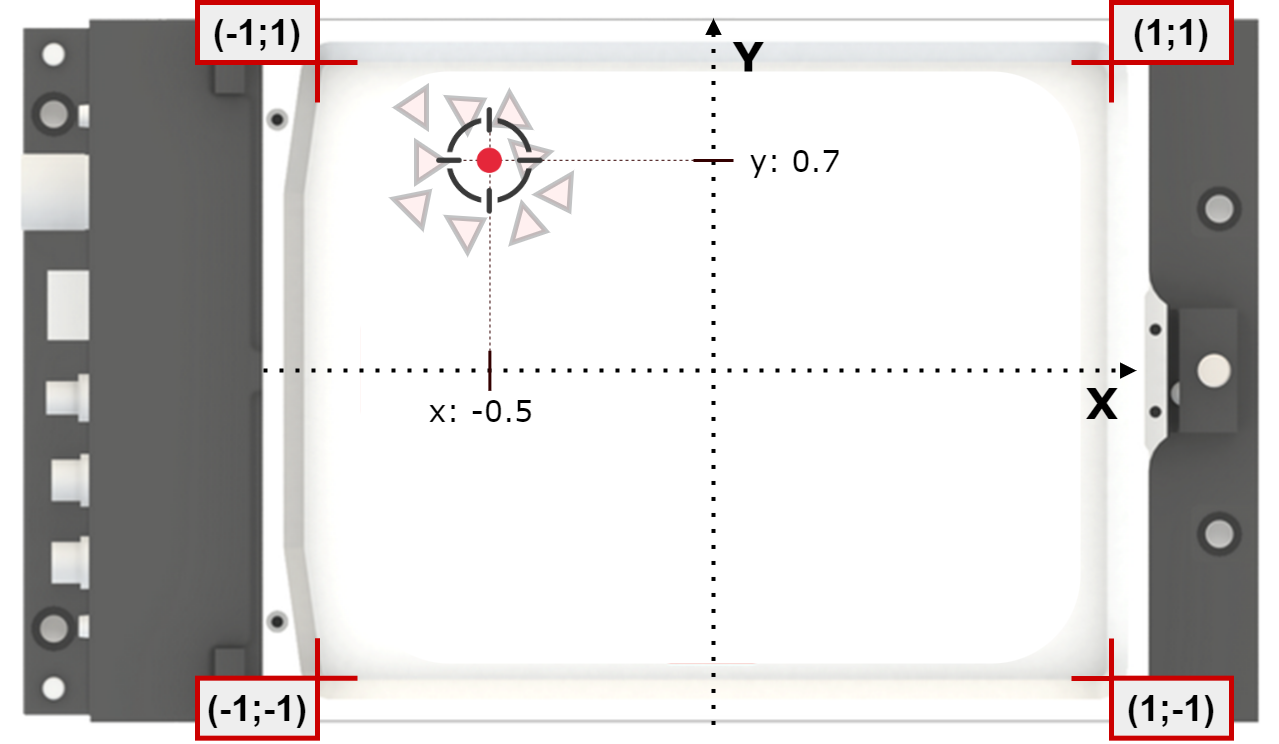
Fig. 117 Centre de masse des pièces - Plateforme normalisée entre -1 et +1
Division de la plateforme pour le centrage intelligent
L’action de centrage intelligent EC utilise les coordonnées du centre de masse données comme paramètres pour sélectionner le type de vibration le plus approprié et optimiser la durée de la vibration. Le type de vibration est sélectionné en fonction de la division de la plateforme indiquée dans la Fig. 118.
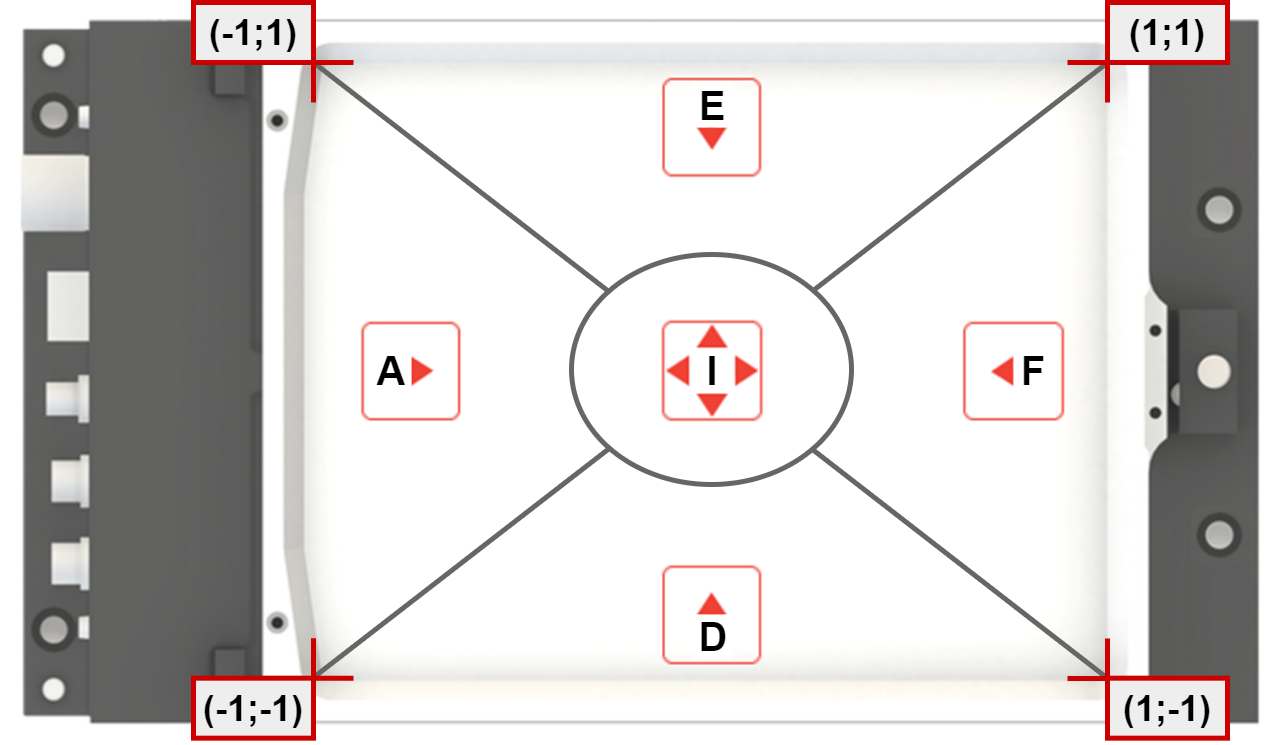
Fig. 118 Division de la plateforme pour le centrage intelligent
Durée de la vibration pour le centrage intelligent
Le calcul de la durée du centrage intelligent est expliqué par l’exemple dans la Fig. 119. Le centre de masse (0.2;0.5) est situé dans la partie E de la plateforme. L’exécution d’un centrage intelligent EC tentera d’amener le centre de masse des pièces au milieu de la plateforme en utilisant le type de vibration E (vers la droite). La durée est calculée en fonction de la coordonnée la plus éloignée \(d_1\) et de la durée nécessaire pour traverser toute la plateforme \(t(d_2)\) (voir Comment définir la durée). Dans l’exemple de la Fig. 119, la coordonnée la plus éloignée est \(Y=0.5\).
La formule ci-dessous est alors utilisée pour calculer la durée \(t(d_1)\).
en supposant que \(t(d_2)\) est fixé à 1500 ms et \(d_2=2\).
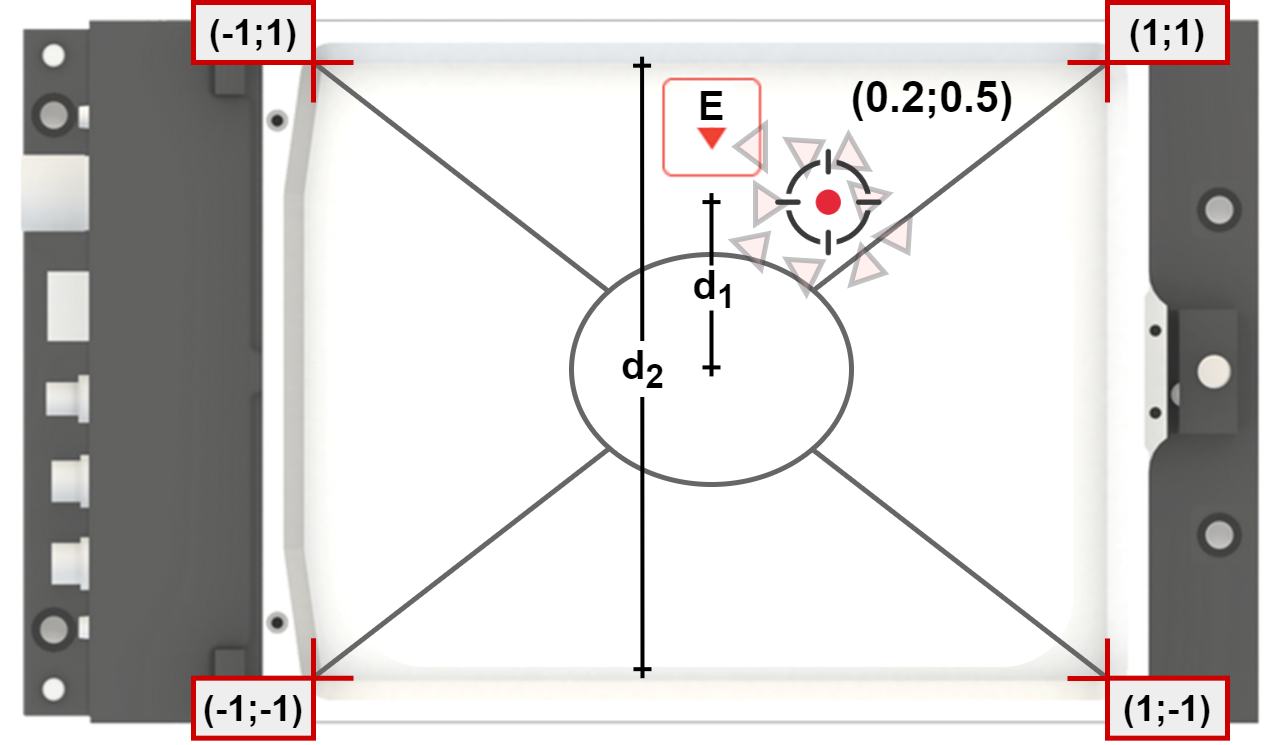
Fig. 119 Durée d’une action de centrage intelligent
Nombre de pièces pour l’alimentation intelligente
Lors de l’utilisation d’une action d’alimentation intelligente EF ou d’une séquence ES qui inclut une action d’alimentation intelligente, le nombre de pièces et le nombre optimal de pièces sur la plateforme doivent être renseignés. Ces paramètres seront utilisés par l’Asycube pour ajuster automatiquement la durée de vibration de la trémie. Plus il y a de pièces sur la plateforme, plus la durée de vibration est courte. La durée de la vibration diminue avec l’augmentation du nombre de pièces pour atteindre zéro lorsque le nombre optimal de pièces sur la plateforme est atteint. Entre les deux, la durée de vibration est interpolée linéairement. Consultez la section Alimentation intelligente pour plus d’informations ou la section Exemples d’alimentation intelligente pour des exemples concrets.