警告
これは、古いバージョンのドキュメントです。 最新の情報をご覧になりたい場合は、次をご覧ください 2025.11 .アジキューブの運転開始
現在、アジキューブの取り付けと設定が完了している状態ですね。ここでは、アジキューブの通信テストに使用できるターミナルと、基本的な自動運転のシナリオを紹介します。
ターミナル
をクリックしてください。すると、ターミナルページ ( 図 5)が表示されます。
図 5 「ターミナル」ページ
ターミナルは、TCP/IP ソケットメッセージングを介してアジキューブと通信します。
基本的な自動運転のシナリオ
この自動運転シナリオは、アジキューブを統合する最も標準的な方法であり、 UR - Set recipe と ES - Execute sequence の 2 つのコマンドのみを使用します。
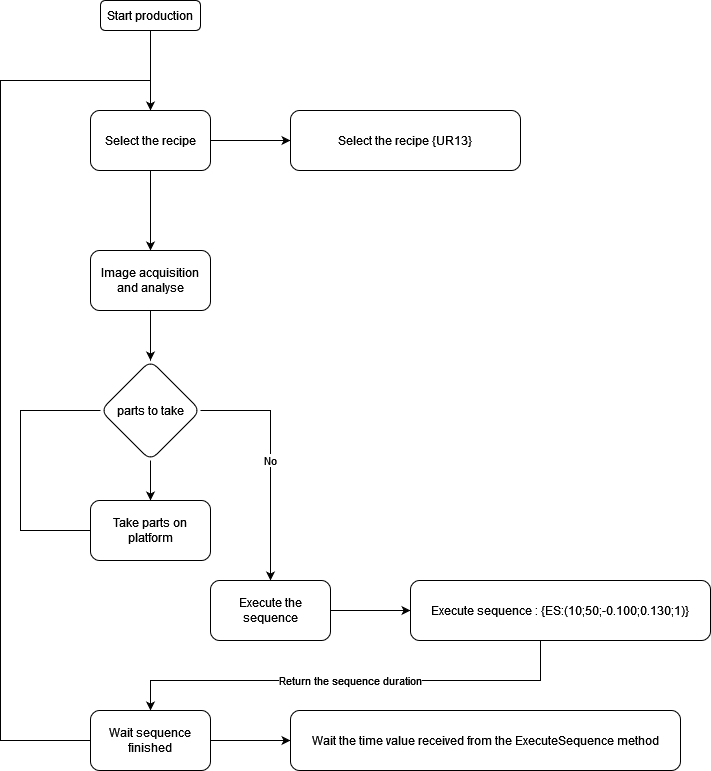
図 6 シーケンスの説明
各パラメータの詳細については、 Commands の完全な説明を参照してください。
第1回目の振動シーケンステスト
現在、アジキューブと通信するために、第1回目のロボット/PLC プログラムを実行する準備が整いました。
注意
通信とコマンドの詳細は、 TCP/IP に記載されています。