Warnung
Sie lesen eine alte Version dieser Dokumentation. Wenn Sie aktuelle Informationen wünschen, schauen Sie bitte unter 2025.11 .Integrationsbeispiele
Standardintegration
Im Folgenden finden Sie ein Beispiel für eine typische Integration mit einem Asycube (Abb. 200). Für diese Standardintegration benötigen Sie pro Asycube einen einzigen AO_Execute_Sequence Block.
Wenn Sie die Produktion starten, wird eine erste Bildanalyse durchgeführt, und solange die zu entnehmenden Teile OK sind, werden ihre Koordinaten an den Roboter gesendet, bis das letzte Teil entnommen ist.
Wenn keine Teile mehr verfügbar sind, lösen Sie die Ausführung einer Vibrationssequenz aus, wobei Sie die Anzahl der sich auf dem Zuführsystem befindenden Teile und die Position ihres Massenschwerpunkts kennen (die Werte inXPosPIN und inYPosPIN entsprechen dem 100-fachen der unter Koordinatensystem des Massenschwerpunkts beschriebenen Werte).
Tipp
Wir empfehlen, die Hintergrundbeleuchtung über den entsprechenden Digitaleingang auszulösen. Sollten Sie diese Möglichkeit nicht haben, kann zur Steuerung die Eingabe boBacklightPIN verwendet werden.
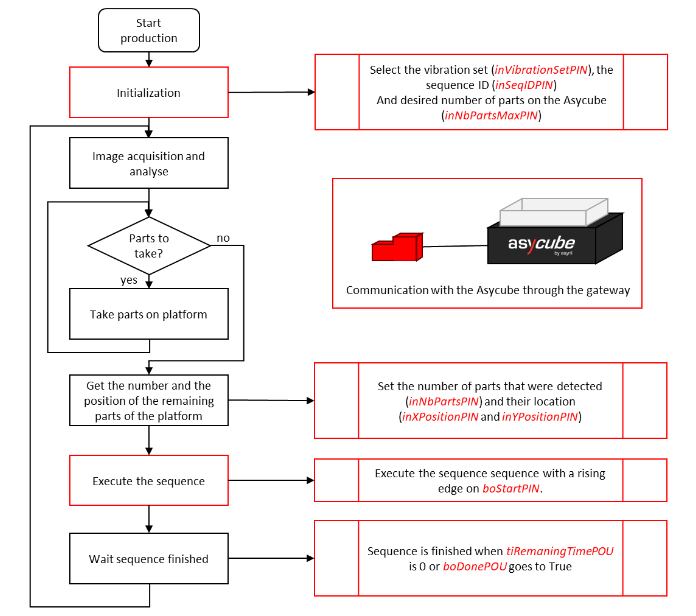
Abb. 200 Beispiel einer Standardimplementierung
Andere Integration
Wenn die Standardintegration nicht zu Ihrer Anwendung passt, können andere AOs verwendet werden. Wir empfehlen jedoch dringend, wie im obigen Standardbeispiel zu arbeiten. Alle AOs sind in der Beschreibung der Add-On-Anweisungen beschrieben.