Warnung
Sie lesen eine alte Version dieser Dokumentation. Wenn Sie aktuelle Informationen wünschen, schauen Sie bitte unter 2025.11 .Beginnen Sie mit der Benutzung Ihres Asycubes
Ihr Asycube ist nun montiert und konfiguriert. In diesem Abschnitt wird das Terminal vorgestellt, das zum Testen der Kommunikation mit dem Asycube verwendet werden kann. Ferner wird das grundlegende Produktionsszenario vorgestellt.
Terminal
Klicken Sie auf , um die Terminal-Seite (Abb. 5) anzuzeigen.
Abb. 5 Terminal-Seite
Das Terminal kommuniziert mit dem Asycube über TCP/IP-Socket-Messaging.
Basis-Produktionsszenario
Dieses Produktionsszenario stellt die Standardmethode zur Integration eines Asycubes dar und verwendet nur zwei Befehle: UR - Set recipe und ES - Execute sequence.
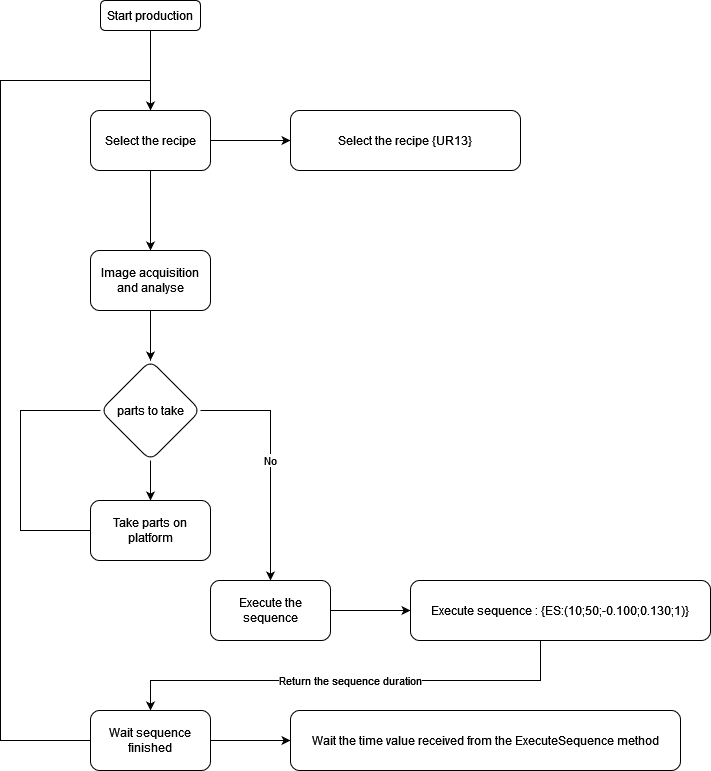
Abb. 6 Beschreibung der Sequenzen
Einzelheiten zu den verschiedenen Parametern finden Sie in der vollständigen Beschreibung der Commands.
Ihre erste Vibrationssequenz
Nun sind Sie bereit, Ihr erstes Roboter/SPS-Programm zu implementieren, um mit dem Asycube zu kommunizieren.
Bemerkung
Weitere Informationen zur Kommunikation und zu den Befehlen sind im Abschnitt TCP/IP zu finden.